You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
Hello,
I am using realsense T265 odometry with Kinect v1 to create a map of the room. The realsense is mounted on top of the kinect with an angle oriented towards the roof.
When moving the robot around sometimes the odometry suddenly drifts. Below is a link to a video where I recorded the robot movements in rviz: Google drive link.
And here is the content of my gmapping launch file:
Hello,
I am using realsense T265 odometry with Kinect v1 to create a map of the room. The realsense is mounted on top of the kinect with an angle oriented towards the roof.
When moving the robot around sometimes the odometry suddenly drifts. Below is a link to a video where I recorded the robot movements in rviz: Google drive link.
And here is the content of my gmapping launch file:
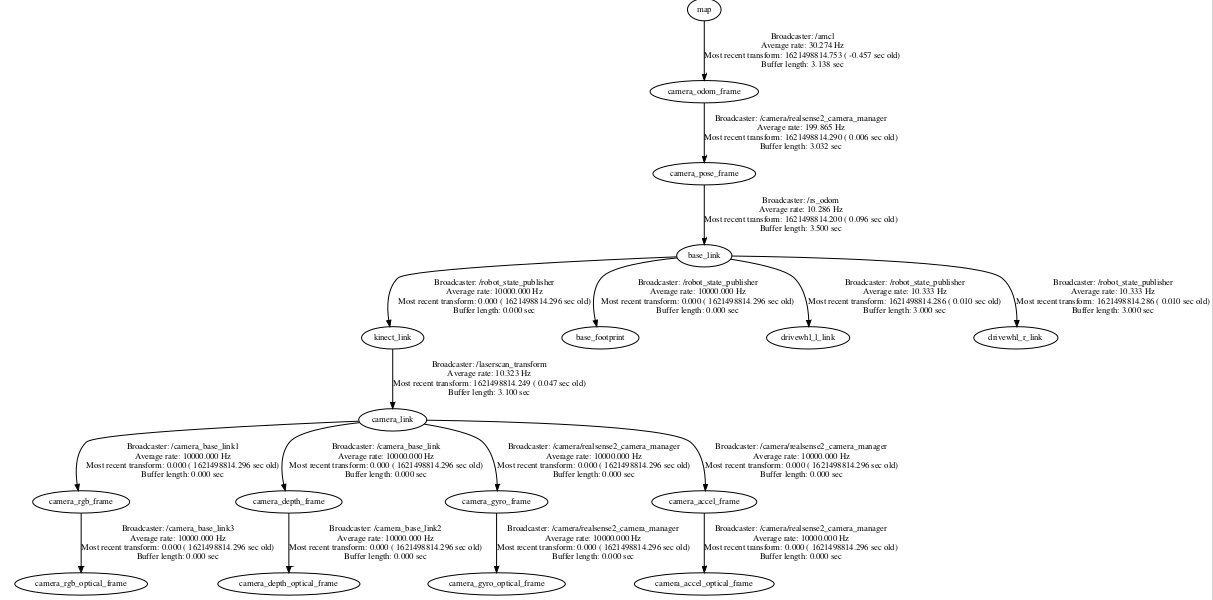
And my TF Tree is the following:
Could it be mischosen parameters ?
The text was updated successfully, but these errors were encountered: